Last week, I ended my research by looking at Google’s project Tango – the ability to generate real-time 3D virtual space from real environments through the use of bluetooth and GPS.
In the case of the digital doctor, rather than personal security, this technology could be used for a variety of life-saving rescue efforts. For example, the mountain rescue service. If a climber becomes stuck on a dangerous peak; a drone could be sent out to create a 3D map of the area, sending the data back to the mountain rescue service. From this, they could use the map to plot the safest route. Furthermore, in conjunction with a video camera, the 3D map could be textured with how the mountain looks on that day, meaning that a route that might be the best option could actually be covered in ice and snow, and so mountain rescue will be able to plan accordingly.
In fact, there are various emergency rescue applications this could be used for, including fire rescue with the ability to map out burning buildings quickly and efficiently to find people who are trapped, as well as police/special forces operations for mapping out raids and uses in hostage situations.
—
Drone design concept:
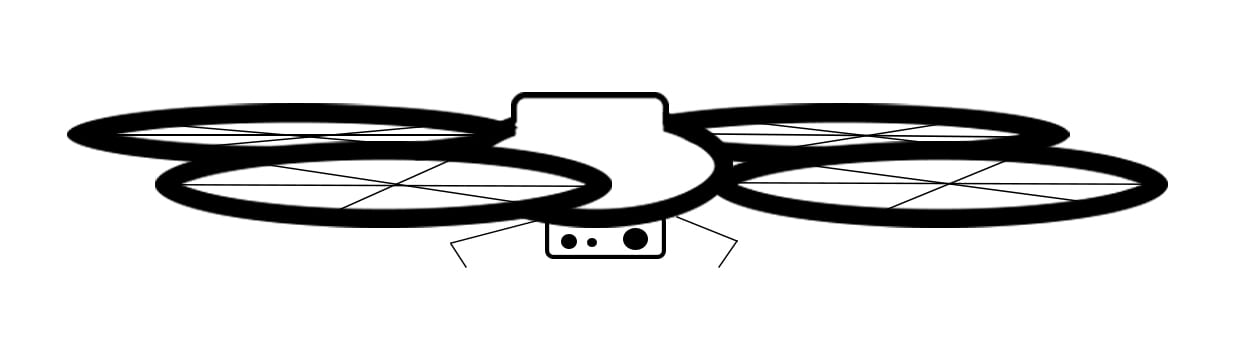
This is a simple concept I made in photoshop showing my idea, and I’m going to explain it in the concept of mountain rescue.
The drone is a quadcopter design which allows for easy, omni-directional movement on six axis without sacrificing mobility. Underneath the machine are a pair of mechanical grips capable of carrying survival equipment and food to any trapped mountaineers to keep them alive while the rescue service plans the rescue. Underneath the drone is a camera similar in design to a Kinect; a single device with a variety of camera technologies included. The device is capable of mapping real-time 3D space, while a second camera captures real-time video which is uses to texture the 3D map. A 3D map is good and allows for easy route planning, but gives no information on weather and environment (beyond geography), which could be hazardous for the rescue team; especially if the planned route turns out to be covered in ice and snow, for instance.. Finally, a third camera could have the ability to provide thermal imaging which could help identify targets in cases of extreme weather or heavy foliage. The drone would run a rechargeable, internal battery (which can be changed if the drone is opened), which in contemporary times would give the device approximately 20 or so minutes of power before needing new batteries or to recharge, however in the future battery technology will undoubtedly get better. As a compromise, a small solar panel will be fitted to the top of the drone, providing an alternate method of charge.
—
Search and rescue drones do actually exist (http://sardrones.org/) however they usually fall short of the “rescue” part; while they are also capable of recording video and carrying packaging, they are unable to effectively map out routes and identify hazards easily. The idea of my drone is to streamline the rescue process, reassure the individual who needs rescuing and also help generate a fast and safe plan for the rescue team themselves.